目前,吉凱恩 (GKN) 公司正在位于德國的 Lohmar 研發中心內,開發一系列模塊化控制算法,協助將動力系統軟件集成至車輛的整體控制系統內。
具體來說,AWD 或電動傳動系統的控制軟件在各層的代碼規模均達到了“兆字節”級別,而每輛車的整體軟件代碼規模也在急劇增加。GKN Lohmar 研發中心軟件和電子系統經理 Michael Schomisch表示,與前代的2014 款相比,采用GKN技術的 2019 款 SUV 的軟件代碼規模將增加 10 倍。
Schomisch 表示,未來隨著汽車系統的技術復雜度不斷高速提升,如何保證各種車內系統的同步和協同工作,將成為一項愈發困難的挑戰。為此,GKN集結了德國 Lohmar、美國 Auburn Hills 和上海研發中心的跨學科研發團隊,共同打造了一種模塊化算法技術。
GKN的專家團隊將對系統進行物理建模,并以圖形的方式創建將嵌入微處理器的控制算法。經過大量仿真和快速成型等早期驗證流程后,GKN將在公司的冬季測試場,對 OEM客戶的研發項目進行平臺和整車測試。值得一提的是,公司的軟件開發和集成團隊自始至終全程參與了車輛的完整設計研發。
這一點非常關鍵,因為在很多項目中,GKN需要“對軟件的開發和集成工作全權負責,”Schomisch 表示,“每個控制器均包含多層軟件,內置基本操作系統、連接應用及電子促動器驅動等組成部分。”
簡單來說,通用應用軟件層將為車輛傳動系統功能與其他電子系統之間的通信提供接口。Schomisch 表示,這些位于不同層的軟件將協同工作,但各自具有“劃分明確的責任領域”。
與以往一樣,安全軟件的重要性毋庸置疑,因為安全軟件可以讓硬件有能力自行處理一些指定參數之外故障或操作。功能應用軟件則負責傳動系統及其性能的具體控制。
實現多層控制
Schomisch 表示,最近的項目成果顯示,通過應用模塊化算法,傳動系統的能量損失已經減少了 25% 左右,目前僅占動力系統總能量損失的 10%。很大程度上,這些進展均是通過對次級傳動系統的精確控制而實現的。
例如,GKN的 Twinster 雙離合器后輪驅動模塊內置了一款汽車動力性能系統控制器,可以管理車輛的 AWD 需求、限滑性能、扭矩矢量控制(包括可以在福克斯 RS 的漂移模式下發揮更大作用的“超速偏移”功能),以及對車輛 ABS 和 ESC 系統的集成。目前,Twinster 的用戶包括福特 Focus RS 及多款通用車型。
Twinster 雙離合器后輪驅動模塊由一款促動器控制器和一款車輛動力性能控制器實現控制。其中,促動器控制器負責管理雙離合系統的驅動,從而實現非常高速的響應。此外,促動器離合器還負責監測、控制離合器溫度、補償離合器磨損、離合器開啟幅度(以減少拖曳扭矩),并提供自我診斷功能。
Schomisch 表示,Twinster 模塊內置的 5個獨立軟件包,可以配合目前已經登陸捷豹路虎 (Jaguar LandRover) 的后橋斷開功能(axle disconnect),實現對先進 AWD系統的管理。后橋斷開系統的促動器控制器可以管理爪形離合器,實現傳動軸的斷開和剎車功能。此外,該控制器還特別集成了連接反饋和自我診斷功能。
更上一層的控制器負責控制連接/斷開序列的激活,最高一層的控制器則負責根據車輛的傳感器數據輸入,管理系統連接/斷開的激活策略。
電動傳動系統的新型控制器
GKN的 eDrive 系統還采用了一些更為復雜的軟件。這家公司開發了一系列新型控制器,用以管理公司的先進電動傳動系統,比如 BMW i8 采用的雙速電子變速器。
在 eDrive 系統結構中,傳動系統的管理軟件將在控制組件震動頻率方面發揮至關重要的作用。否則,電動傳動系統中的尖銳干擾共振噪聲,將通過車輛結構件傳入車艙,影響車上人員的安靜乘車體驗。
同樣重要的是,GKN公司的傳動系統管理軟件還可以與其他車輛系統進行通信,從而讓數據在系統控制策略中發揮更大作用。值得一提的是,GKN的 eDrive 系統還可以安全支持 OTA 升級。
At its Lohmar, Germany, R&D facility, GKN Driveline is creating modular control algorithms for new applications including integration of drivetrain software into a vehicle’s overall control system.
Control software for an AWD or electric driveline system demands more than a megabyte of code in multiple layers, while the sheer volume of software code per vehicle has increased dramatically. One 2019-model SUV using GKN technology will feature 10 times as much software code as its 2014 predecessor, according to Michael Schomisch, the Software and Electronics Manager at Lohmar.
He noted that with rapidly increasing technical complexity of vehicle systems comes "the increasingly challenging task of synchronizing the various systems to work together.” To do this, GKN's “unique” modular algorithm approach brings together multi-disciplinary teams from its Lohmar, Auburn Hills (USA) and Shanghai facilities.
The company’s specialist teams model the system’s physics and graphically create control algorithms to embed into a microprocessor. After simulation and rapid prototyping facilities provide early validation, GKN undertakes rig tests and vehicle integration activities on OEM development programs at its winter test sites. Software development and integration teams are fully incorporated into the vehicle engineering teams throughout this process.
This is crucial because for many programs GKN is "entirely responsible for the software development and integration," Schomisch said. "Each controller contains various layers of software. These include the basic operating system, connectivity applications, and the drivers for electronic actuators.”
A general-application software layer provides the interface between the driveline’s functions and other electric systems in the vehicle. These different layers of software interact but have "distinct areas of responsibility,” he said.
As always, safety software is paramount, enabling hardware to self-manage malfunctions or operations outside assigned parameters. Function applications software looks after specific control of the driveline systems and their performance.
Providing control on multiple levels
Driveline energy losses have been reduced by around 25% on recent programs, Schomisch said, and now account for only 10% of the total energy losses associated with transferring torque from the motor to the wheels. Much of this progress has been achieved through more precise control of the driveline subsystems.
For example, in GKN’s Twinster twin-clutch rear drive module that is fitted to the AWD Ford Focus RS and various GM vehicles, a vehicle dynamics controller manages the on-demand AWD, limited-slip and torque vectoring strategies (including the over-speed offset which, in the Focus RS, is exploited further with Drift mode), and the integration with the vehicle’s ABS and ESC systems.
The system is operated by an actuator controller and a vehicle dynamics controller. The actuator controller manages the twin-clutch actuation to achieve very fast response rates. It also monitors and adapts to clutch temperature, compensates for clutch wear, manages the wide clutch opening (to reduce drag torque) and delivers a self-diagnostic capability.
Five separate software packets manage the more advanced "hang-on" AWD system with axle disconnect used by Jaguar Land Rover, according to Schomisch. The disconnect system’s actuator controller manages the dog clutch, enabling the propshaft disconnect and brake function, which also incorporates connection feedback and self-diagnostics.
The next higher level controller controls the activation of the connect/disconnect sequence. The highest level controller manages the system’s strategy for activation of the connect/disconnect, based on data inputs from the vehicle’s sensors.
New controllers for electric drives
Even more complex software is used to control GKN's eDrive. A completely new range of controllers was developed to manage advanced electrified drivetrains, including the system in BMW’s i8 which has a 2-speed electronic transmission.
For this system, software within the driveline plays a vital role in managing the frequency levels emitted from the components; it would be unacceptable for vehicle occupants to be disturbed by a high-pitch whine resonating from the electric driveline through the vehicle structure.
Equally crucial is that the software developed to manage the driveline is able to communicate with other vehicle systems, so that data can be analyzed and acted on as part of the control strategies. It also has to securely accept over-the-air (OTA) updates.
Author: Stuart Birch
Source: SAE Automotive Engineering Magazine
 GKN 開發了一系列新型控制器,管理公司的先進電動傳動系統,比如 BMW i8 采用的雙速電動變速器。(圖片來源:GKN)
GKN 開發了一系列新型控制器,管理公司的先進電動傳動系統,比如 BMW i8 采用的雙速電動變速器。(圖片來源:GKN)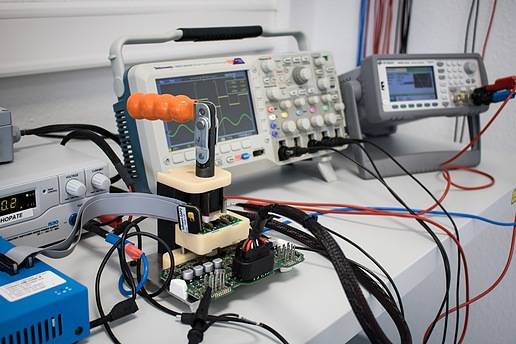 軟件集成測試的典型測試環境。(圖片來源:GKN)
軟件集成測試的典型測試環境。(圖片來源:GKN) 吉凱恩的 Twinster AWD 系統已經登陸歐寶 Insignia 轎車。(圖片來源:GKN)
吉凱恩的 Twinster AWD 系統已經登陸歐寶 Insignia 轎車。(圖片來源:GKN)