如今,越來越多的公司開始前仆后繼地涌入自動駕駛汽車領域,渴望能在這個生機勃勃的市場中分一杯羹。Mentor Graphics公司的嵌入式系統部門也不例外,這家公司推出了一款自動駕駛模組,可直接利用傳感器的原始數據,做出駕駛決策。
Mentor公司的這個最新平臺能夠捕捉并融合來自雷達、激光雷達、視覺傳感器等系統的原始數據輸入,而后判斷車輛是否需要做出轉彎、制動等動作。在底特律舉行的SAE 2017 全球汽車年會(WCX17)上,Mentor公司的DRS360模組正式發布。該模組的主要應用場景為SAE Level 5自動駕駛汽車,但也可用于支持ADAS。
DRS360模組的硬件組成包括賽靈(Xilinx)的現場可編程門陣列(FPGA),及一些基于X86或ARM架構的微控制器。軟件則主要基于公司行業領先的汽車Linux平臺,需運行Linux軟件。
與許多安全系統不同,Mentor的DRS360模組可直接使用傳感器的原始數據。一般來說,絕大部分公司都會為傳感器配置微控制器,在數據進入汽車系統之前對其進行一些基礎的處理,從而降低傳感器對帶寬需求,并減輕中央處理模組的工作負擔。
Mentor公司的工程師認為,考慮到像以太網等網絡可以滿足絕大多數高分辨率傳感器的帶寬要求,因此直接使用原始數據是個更加高效的選擇。摒棄在傳感器內安裝運算模組的設計,可以同時節約時間和成本,對于滿載各種傳感器的自動駕駛汽車來說更是如此。
“在自適應巡航控制系統中,車輛雷達配置了一個處理器。該處理器會先對數據進行篩選,而后將重要部分傳入車輛系統,并供后者判斷車輛是否需要采取剎車等行動。”Mentor Graphics公司嵌入式系統部門總經理Glenn Perry表示,“在傳感器中增加處理器的設計會帶來延遲,需要使用的材料種類自然也更多。考慮到SAELevel 5自動駕駛汽車所裝載的大量激光雷達、雷達及攝像頭,這種作法會給汽車廠商帶來沉重的成本壓力,并造成巨大的計算負擔,因此可能行不通。”
DRS360模組的功率不到100 W。在最近進行的測試中,我們發現,當設備采用的傳感器越多,這款模組的性能優化效果就越明顯。技術人員在運行“行人、自行車、汽車”目標分類算法時使用了一個單獨傳感器,而后又增加了更多傳感器輸入。當一組傳感器的輸入相互融合后,系統分析數據所需的計算能力降低了。
“當采用一個傳感器時,我們的CPU負載在85%左右,完成目標分類大約需要600ms,置信度為65%。”Perry說,“當我們增加雷達和激光雷達的數量時,系統的置信水平有所提高,而CPU負載卻下降至55%,分類時間僅為1ms。”
Perry指出,“我們很驚訝地看到,當CPU需要處理的數據更多時,其數據傳輸量反而下降了,這是違反常理的。”
事實上,性能并非各家廠商決定是否購買Mentor模組的唯一理由,一級供應商及各廠商集團所處的商業環境也將發揮關鍵作用。
與當今流行的分布式處理器架構相比,Mentor的模組采用了一款強大的中央處理器。很多自動駕駛架構也采用了中央控制器,而這均非常依賴預處理數據輸入。Mentor公司ADAS部總監AminKashi認為,公司的購買決定主要是從商業方面考慮,而非技術。
“從組織結構和供應鏈方面考慮,目前行業似乎對‘整合’的概念有所抵觸。”Kashi表示,“也就是說,市場上有一些信息娛樂設備在與車內相關系統的整合時,根本沒有考慮太多結構的問題,特別是一些中國廠商尤其如此。”
開放性也是DRS360的另一個商業加分點。一些供應商僅能向客戶提供黑盒解決方案,因此客戶很難改變其中的硬件或軟件。Mentor則允許廠商根據需要,自行調整模組的算法和硬件設計。
Perry表示,“很多廠商均視ADAS為各家公司拉開差距的地方,但如果他們都只能拿到同一個黑盒解決方案,就很難真正拉開差距。而我們提供的開放平臺則允許他們根據公司需要,進行一些定制處理,真正讓他們的產品脫穎而出。”
The race to gain a foothold in the emerging autonomous vehicle market continues to attract more players. Mentor Graphics Embedded Systems Division is joining the game, introducing a system that captures raw sensor data and makes driving decisions.
Mentor’s new platform captures and fuses raw data from radar, lidar, vision and other sensors, then decides whether to turn, brake or take other actions. The DRS360, unveiled at the SAE WCX17 in Detroit, is aimed primarily at SAE Level 5 autonomous vehicles, though it can also be used for advanced driver assistance systems (ADAS).
The hardware includes Xilinx FPGAs Mentor and either X86- or ARM-based microcontrollers. It runs Linux software, building upon the company’s claims of leadership in automotive Linux.
Unlike many safety systems, Mentor is using raw sensor data. Many companies add microcontrollers to sensors, doing elementary processing before data goes onto the network. That reduces bandwidth requirements and lightens the workload for the central processing modules.
Mentor engineers contend that it’s more efficient to stream raw data, since networks like Ethernet can meet even the demands of many high-resolution sensors. Eliminating intelligence within sensors can save both time and money, especially in sensor-laden autonomous vehicles.
“In adaptive cruise control, the radar has a processor that filters out data; the important data is then sent to a system that decides whether it needs to brake,” explained Glenn Perry, General Manager of the Mentor Graphics Embedded Systems Division. “Adding a processor in the sensor induces latency and adds to the bill of materials. When you have all the lidar, radar, cameras needed for Level 5, I’m not sure this works. It will be expensive and consume an extraordinary amount of compute power.”
The Mentor module, which has a power budget of under 100W, actually improved performance in a recent test in which more sensors were added. Technicians used a single sensor when they ran object classification algorithm with a pedestrian, bicycle and vehicle, then added more sensor inputs. When input from complementary sensors was combined, it took less compute power to analyze the data.
“With one sensor, we were at an 85% CPU load with a classification time of about 600 milliseconds and a confidence rating of 65%,” Perry said. “When we added radar and lidar, the confidence level rose, the CPU load went down to 55% and the classification time was one millisecond.
"We were surprised how much the CPU load dropped; it was counterintuitive to stream in more Gbits of data and see a decline,” ne noted.
Performance won’t be the only factor that determines whether companies buy into Mentor’s concept. Business issues driven by Tier 1s as well as OEM groups will play a key role.
Mentor’s architecture utilizes a powerful centralized computer, in contrast to today’s distributed-intelligence architectures. Many autonomous architectures also employ a centralized controller that relies heavily on pre-processed inputs. Amin Kashi, Mentor’s ADAS Director, contends that this is driven by business rationales, not technical efficiency
“There’s been a resistance to consolidation, more due to organizational structures and supply chain issues,” Kashi said. “That said, there’s been some consolidation in infotainment and in-vehicle infotainment systems, especially by the Chinese, who don’t care much about structures.”
Openness is another plus on the business side. Some suppliers offer only a black box, so it’s difficult to alter hardware or software. Mentor will let OEMs tweak algorithms and hardware designs.
“OEMs feel ADAS is an area of differentiation, but if they can only get a black box, it’s difficult to differentiate. With an open platform, they can make alterations to differentiate their offerings,” Perry said.
Author: Terry Costlow
Source: SAE Automotive Engineering Magazine
 在底特律舉行的SAE WCX17全球汽車年會上,Mentor公司的DRS360正式發布。該模組的主要應用場景為5級自動汽車,但也可用于支持ADAS。DRS360模組的硬件組成包括賽靈(Xilinx)的現場可編程門陣列(FPGA),及一些基于X86或ARM架構的微控制器。軟件則主要基于公司行業領先的汽車Linux平臺,需運行Linux軟件。
在底特律舉行的SAE WCX17全球汽車年會上,Mentor公司的DRS360正式發布。該模組的主要應用場景為5級自動汽車,但也可用于支持ADAS。DRS360模組的硬件組成包括賽靈(Xilinx)的現場可編程門陣列(FPGA),及一些基于X86或ARM架構的微控制器。軟件則主要基于公司行業領先的汽車Linux平臺,需運行Linux軟件。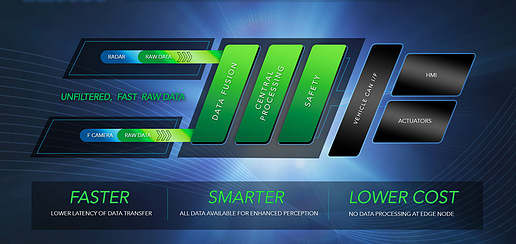 與當今流行的分布式處理器架構相比,Mentor的模組采用了一款強大的中央處理器。
與當今流行的分布式處理器架構相比,Mentor的模組采用了一款強大的中央處理器。