未來,如果捷豹路虎(Jaguar Land Rover)全地形自動駕駛汽車的車主決定離開車道開啟一段越野旅程,那車輛搭載的自動駕駛技術,也將在碎石小道或山間小路上繼續為車主提供指導,自動查看車輛前進方向的各種信息,無論是地表狀況、頭頂的樹枝還是具有威脅性的巨石。對于這一點,捷豹路虎的工程師很有信心。
此外,除了在道路駕駛環境下的應用外,未來V2V(車間)通信功能也將在越野領域發揮作用,前方車輛可以不間斷地向后方車輛發送更新有關障礙物和潛在威脅的預警信息。
捷豹路虎開展了一項專注越野互聯車隊的研發項目,以上這些功能都是項目研發中的一部分。捷豹路虎產品戰略總監James Towle表示,“未來,我們將提供支持所有路面和地形特征的自動駕駛駕駛功能。”
在未來四年中,捷豹路虎將借助一隊擁有100輛車的車隊,進行互聯/自動駕駛技術真實駕駛工況測試。目前,捷豹路虎至少正在進行10個相關研究項目。
但是,這并不意味駕駛員可以在車輛穿越叢林時隨便打盹。Towle解釋說,自動駕駛系統和無人駕駛系統之間存在明顯區別。因此,捷豹路虎的研發主要集中在為駕駛員提供技術支持。Towle表示,“我們不是想簡單地用自動駕駛系統替代駕駛員。”
此外,捷豹路虎還決心保留旗下產品的固有特色,但同時從另一方面培養用戶對車輛及駕駛員輔助技術的信心。
傳感器支撐起自動駕駛系統
在進行自動駕駛汽車項目時,捷豹路虎與博世(Bosch)合作,共同整合下一代傳感器技術,并提升車載計算機的處理能力。“舉個例子,我們正在提升立體攝像頭的像素,”博世消費者首席工程師Sven Lanwer表示,“將來,就可以提供更加精準的信息;此外,互聯車輛通信網絡的帶寬也將有巨大提升,從而保證更多功能的實現。”
Lanwer正在與捷豹路虎高級研發經理ChrisHolmes開展密切合作。Holmes曾表示,傳感器技術的不斷進步與軟件開發的結合,可以帶來更多全新解決方案。比如,捷豹路虎為了實現停車協助功能而開發的超聲波傳感器,現在也成為了公司預測性越野自動駕駛汽車研發項目的一部分,可用于預測地表的變化。
除了信息質量需要提高,對信息數量的控制也必不可少。如果不進行信息篩選就直接提供給駕駛員,造成接收信息過多,是否也會帶來一些危險?
“這個問題很難回答,”Holmes表示,“在公司占地300英畝的英國試車場中,我們向你展示的是一些已經成型的基本組成部分。這就是一種可能性不斷擴展的藝術,隨著傳感器和軟件方面的進步,自動駕駛技術也不斷高速發展,可以實現一些高級功能。我們正在進行多種嘗試,尋找提示駕駛員的最佳方法。”
捷豹路虎的工程師向SAE《汽車工程》雜志(微信號:SAEInternational)透露,公司可能會增加對抬頭顯示器和語音命令系統的應用。但在危險或緊張環境下,駕駛員最應該關注的是車外的情況,因此這個時候在車輛顯示器上推送各種信息毫無作用。分級語音警報可以在不營造緊張氣氛的情況下為駕駛員提供預警信號嗎?也許有可能。
當然了,駕駛員必須充分信任車輛提供的信息,正如同他們信任今天的制動和轉向系統一樣。
Towle表示:“智能汽車永遠都不會分心,甚至可以提前‘感知’到水平線以外的情況。我們進行全地形自動駕駛研究,主要是為了盡可能地擴大自動駕駛汽車在真實生活中的適用范圍,無論是道路行駛還是越野環境,當然還有不同的天氣狀況。”
他補充說,隨著時間的推移,駕駛員的確需要學著去“相信”自動駕駛汽車。
捷豹路虎對自動駕駛的未來充滿信心。公司互聯技術總監Peter Virk補充說:“在不到未來三年內,我認為全世界售出的所有新車都將會是互聯車型。”但他同時強調,在適當的時間為駕駛員提供適當的信息必不可少。
DSRC技術是實現隊列駕駛功能的關鍵
雖然捷豹路虎在自動駕駛汽車研發中采用了大量的既有技術,比如超聲波雷達、雷達、立體攝像頭、激光雷達和無線電系統等,但未來此類技術的發展可能更多局限在進化層面,而難以實現根本的變革。
捷豹路虎向筆者展示了一系列公司的自動與半自動系統重點研發項目,其中包括一項基于地形的自適應車速調節系統(Terrain Based Speed Adaptation)。具體來說,該系統可以利用車輛的立體攝像頭掃描前方道路,然后依據返回的地表信息做出決定,自動適當調節車速,并通過懸掛設置提升乘駕舒適度。
地表標識(Surface ID)是全地形自動駕駛技術的基本參數之一。車輛的超聲波傳感器可以掃描車輛前方5米內的情況,為人工智能提供信息以評估周邊環境,然后做出捷豹路虎口中的“適當的決定”。捷豹路虎掃描了沙地、碎石及雪地等路面信息,并將其寫入數據庫。而后,車輛的超聲波雷達可以交叉參考數據庫內的數據,而后進行最優的設置。
捷豹路虎的互聯隊列系統(Connected Convoy System)采用無線專用短程通信(DSRC)技術,可以利用車輛位置、車輪滑移、懸掛高度變化及車輪鉸接等多種信息,實現隊列駕駛功能。DSRC技術可以配合一些現行技術發揮作用,比如全地形前進控制(All TerrainProgress Control)和地形響應(Terrain Response)設置等。
雖然看起來這些技術可以在軍事領域發揮作用,但捷豹路虎的發言人表示,公司的互聯隊列系統主要針對民用領域。
捷豹路虎開發的另一個新系統名為凈空高度協助(Overhead ClearanceAssist),可以在行車方向上存在下掛樹枝或在進入凈空高度較低路段時,警告駕駛員車頂上放置的物品可能會造成一些問題。該系統基于攝像頭發揮作用,駕駛員在使用時僅需輸入車頂物品的高度,方便系統計算車輛總高度,從而在車輛進入凈空高度較低區域時提供警示。這一系統同時支持道路和越野應用。
捷豹路虎正在研發的另外一項道路技術是“安全駛離(Safe Pullaway)”系統。該系統可以協助駕駛員避免與其他車輛發生碰撞,一般在環道或十字路口等駕駛員精神壓力相對較高的環境下發揮作用。具體來說,車輛搭載的前向立體攝像頭將密切關注車輛前方的區域。如果在攝像頭檢測到前方存在物體的情況下,駕駛員還試圖從靜止開始加速,車輛不但不會前進,還會給出視覺警示。
在捷豹路虎的道路技術演示中,有一處特別值得注意 – 為了增強現有的雷達自適應巡航控制系統(ACC),公司開發了一款基于車輛-基礎設施(V2I)和車間(V2V)通信技術的升級版協作自適應巡航控制系統(C-ACC)。
DSRC無線技術允許車輛在“幾毫秒”的時間內對前車的信息做出反應。后車將跟隨前車,以同樣的速度前進,并在同樣的時刻剎車。DSRC技術是自動隊列功能的基礎,隊列車輛之間的信號延遲僅為0.4秒。現階段,根據各個市場不同,ISO標準對ACC系統的延遲規定在0.8秒。
經過筆者的親身感受,隊列駕駛車輛在重新啟動時最初令人擔憂,而后又讓人放心。緊跟在前車后方可以提高車輛雷達ACC系統的效果,但卻很容易讓駕駛員精神緊張,畢竟駕駛員不得不克服自己在看到前車的剎車燈時,跟著猛擦剎車的反射動作。
現階段,相關法規將如何規定,我們還不得而知。但是正如其他自動駕駛功能一樣,即使雷達ACC系統可能已經在合理范圍內證明了自己的功能,但這個復雜系統到底何時才能上市,這仍取決于法律法規和駕駛員/乘客的接受程度。
作者:Stuart Birch
來源:SAE《汽車工程》雜志
翻譯:SAE 中國辦公室
JLR prepares to leave the road — autonomously
JaguarLandRover engineers are confident that when a driver of one of their future all-terrain autonomous vehicles wants to leave the pavement, technology will continue to provide guidance along gravel lanes or mountain trails, automatically checking ahead for anything from changing surfaces to overhead branches and threatening boulders.
And just as future V2V (vehicle to vehicle) communications capability will become available for autonomous on-road driving, it will also be available for off-road, constantly transmitting and updating warning information about obstacles and potential dangers to any following vehicles.
All this is part of a significant R&D program focused on off-road connected convoys. “In the future we will offer autonomous driving over any surface or terrain,” said JLR Product Strategy Director, James Towle.
Over the next four years, JLR will conduct real-world testing of Connected and autonomous technology using a fleet of 100 vehicles. Currently, it is running at least 10 main research projects in this area.
But that doesn’t mean the driver can take a nap while the vehicle claws its way through the jungle. There is a distinct difference between autonomous and driverless system capability, explained Towle. So R&D is concentrating on giving the driver focused technology support: “We aren’t looking at simply replacing the driver,” he said
JLR is also determined to retain the established character of its products while imbuing a different type of emerging trust in the vehicle and its driver-support technologies.
Sensor building blocks
For its autonomous program, JLR is collaborating with Bosch in integrating next-generation sensor technology and processing power. “For example, we are adding more megapixels to stereo cameras,” said Bosch Customer Chief Engineer, Sven Lanwer. “This will increase in future to provide more precise information; bandwidths are going up to give greater capabilities.”
Lanwer works closely with Chris Holmes, JLR’s Senior Manager Research, who said advances in sensor technology allied to software are providing significant new solutions. Ultrasonic sensors developed from those used as parking aids, are part of JLR’s predictive off-road autonomous R&D to anticipate surface changes.
While information quality needs to improve, increased quantity needs to be controlled. Is there a danger of giving the driver too much information by not filtering it sufficiently?
“It is a difficult question to answer,” stated Holmes. “What we are showing you [at JLR’s 300- acre Gaydon, U.K., proving ground] are some baseline building blocks that we are putting in place. It is the art of the possible. Technologies are evolving at a rapid rate based on sensor improvement and, coming together with software advances, are giving high level capabilities. So we are looking at many ways of how to advise the driver.”
This could include increased use of head-up displays and certainly of voice-command systems, the engineers told Automotive Engineering. It is no use in potentially dangerous or stressful situations putting up information on a screen while the driver’s eyes are focused where they should be—outside the cabin. Could tonal gradations of voice alert be considered to soothe and provide confidence without adding to tension? Possibly.
Certainly the driver must have confidence and belief in what the car is telling them, just as he or she has confidence today in brakes and steering operating safely.
Said Towle: “An intelligent car is never distracted because it is connected—it can even be aware of situations developing over the horizon. The aim of our autonomous all-terrain driving research is to make the self-driving car viable in the widest range of real life, on and off-road driving environments and weather conditions.”
He added that over time the driver would indeed learn to “trust” the vehicle.
JLR is confident that this is going to happen. Peter Virk, JLR’s Director of Connected Technologies, added: “In less than three years I predict that every new car sold in the world will be ‘connected’.” But he also stressed that giving the right information at the right time to the driver was essential.
DSRC is key to convoying
While the company is making use of off-the-shelf and established technologies like ultrasonics, radar, stereo cameras, LiDAR and radio systems, these are being improved although it is more a matter of evolution than revolution.
Key autonomous or semi-autonomous programs demonstrated by JLR to the author included Terrain Based Speed Adaptation, which adapts speed automatically to changing surface conditions and also improves comfort via suspension settings. A stereo camera scans the route ahead with features mapped against different target speeds, making decisions about appropriate speeds for conditions.
Surface ID is a fundamental element of autonomous driving on any terrain. Artificial intelligence can assess surroundings and make what JLR describes as “appropriate decisions,” ultrasonic sensors scanning 5 m (15 ft) ahead of the vehicle. Surfaces including sand, gravel and snow are scanned-in to create a database, which is cross-referenced with real time ultrasonic returns, allowing the vehicle to pre-emptively optimize relevant settings.
The Connected Convoy System using wireless Dedicated Short Range Communications (DSRC) uses information including vehicle location, wheel-slip, changes to suspension height and wheel articulation. The DSRC works with current production technologies such as All-Terrain Progress Control and Terrain Response settings.
Although seemingly useful for military applications (a Land Rover bailiwick), a JLR spokesperson said the R&D Connected Convoy system is focused only on civilian applications.
Overhead Clearance Assist, another new system, is aimed at both on- and off-road applications. It can cope with overhanging branches off road or warn the driver that roof-carried objects such as bicycles could cause a problem when entering a low-overhead parking structure. To operate the camera-based system, the driver simply adds the height of anything carried on the roof to the known height of the vehicle and would then be alerted by the system to any likelihood of entrance to a low height area.
On-road technologies under development include a “Safe Pullaway” system to prevent a vehicle colliding with one in front, typically at roundabouts or intersections when driver mental workload is high. A forward facing stereo camera keeps watch on the area immediately ahead of the vehicle. If the driver tries to accelerate from standstill and an object ahead is detected, the car will not move and a visual warning is shown.
Of particular interest in JLR’s on-road technology demonstrations was Co-operative Adaptive Cruise Control (C-ACC) using vehicle-to-infrastructure (V2I) and V2V communications to enhance existing radar ACC systems.
DSRC wireless is used to facilitate reaction within “a few milliseconds” to messages from the vehicle in front. The following vehicles would brake at precisely the same moment and rate as a lead car. This could facilitate autonomous platooning, with a gap time between vehicles of as little as 0.4 s. At present, depending on market, ISO standard for ACC is about 0.8 s.
Sampled by the author on a track, the effect was both worrying (initially) and reassuring (subsequently) as the system was activated. Following very close behind another vehicle improves radar ACC effectiveness but does concentrate the driver’s mind, with a need to overcome the reflex action of braking hard as the red lights of the vehicle ahead illuminate.
Quite what the law would make of this has not been defined. But like most aspects of autonomous driving, it will be legal and driver/vehicle occupant acceptance of such apparently esoteric systems that will determine their introduction—even though their efficacy may have been proven beyond reasonable doubt.
Author: Stuart Birch
Source: SAE Automotive Engineering Magazine
 全地形自動駕駛功能是捷豹路虎研發項目的重要組成部分之一,其中還包括隊列駕駛功能。
全地形自動駕駛功能是捷豹路虎研發項目的重要組成部分之一,其中還包括隊列駕駛功能。 捷豹路虎的工程師表示,互聯越野車隊中的頭車可以發出信號,提醒后車前方存在障礙物。
捷豹路虎的工程師表示,互聯越野車隊中的頭車可以發出信號,提醒后車前方存在障礙物。 基于地形的速度自適應系統是捷豹路虎的全地形自動駕駛研究項目的組成部分。
基于地形的速度自適應系統是捷豹路虎的全地形自動駕駛研究項目的組成部分。 捷豹路虎的地表標識系統采用兩個定制超聲波傳感器,可以掃描車前5米內的地形。
捷豹路虎的地表標識系統采用兩個定制超聲波傳感器,可以掃描車前5米內的地形。 你是否經常忘了車頂的行李架?沒關系,捷豹路虎正在開發一個系統,可以提示駕駛員車輛上方存在障礙物或凈空高度有限等信息。
你是否經常忘了車頂的行李架?沒關系,捷豹路虎正在開發一個系統,可以提示駕駛員車輛上方存在障礙物或凈空高度有限等信息。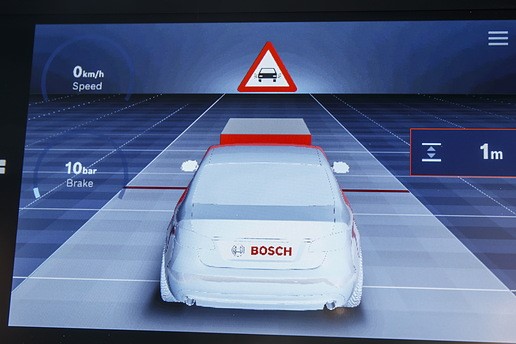 在十字路口或環島路況下,避免車輛啟動時的追尾事故也是捷豹路虎的研發目標之一。
在十字路口或環島路況下,避免車輛啟動時的追尾事故也是捷豹路虎的研發目標之一。 捷豹路虎產品戰略總監James Towle表示:“未來,我們將能提供支持任何路面和地形的自動駕駛汽車。”
捷豹路虎產品戰略總監James Towle表示:“未來,我們將能提供支持任何路面和地形的自動駕駛汽車。” 捷豹路虎高級研發經理Chris Holmes表示,“基于傳感器的發展,自動駕駛技術也正以相當快的速度進步。”
捷豹路虎高級研發經理Chris Holmes表示,“基于傳感器的發展,自動駕駛技術也正以相當快的速度進步。”