長期以來,推動高級駕駛員輔助系統(ADAS)和電氣化發展的可能是乘用車領域,但如今,能夠更快更廣地應用這些技術的,卻可能是非公路車輛領域。
“盡管由于各種法規限制,(駕駛員輔助系統)在車輛中應用的難度非常大,但如今其發展仍主要集中在乘用車領域。”采埃孚公司負責工業技術高級工程的Manuel Götz博士表示,“因此,我相信未來大家將在非公路領域看到更多自動駕駛技術的應用,其發展速度甚至會超過乘用車領域。非公路設備領域是個相對封閉的環境,也沒有道路車輛領域的種種法規限制,因此在應用這些自動駕駛技術方面應該會更簡單。”
Götz博士補充道,“另外,這種高度自動化的趨勢,還可能導致未來受過專業培訓的駕駛員越來越少,從而缺乏訓練有素的駕駛員來操作這些日益復雜的機器。因此,我們的“創新拖拉機”(Innovation Tractor)產品就開始向自動化操作方向發展。”
采埃孚公司正齊心協力,將其最初為乘用車開發的各種智能系統推廣至重型卡車、大巴,及各種非公路設備。為了有效貫徹這個方針,去年采埃孚公司高級工程部門的工程師花費了一年時間,設計了一款裝滿攝像頭和各種電子設備的Innovation Tractor展示設備,可實現自動轉向與鉤掛,更不用說進行行人監測了。采埃孚在德國亞琛展示了這款Innovation Tractor的性能:在一段坡度30%的水下路段行駛時,這款拖拉機在單輪驅動模式下,表現出優異的牽引力管理性能。
“我們不僅能夠完全控制設備的動力傳動系統和發動機,還能控制轉向和制動系統。”Götz博士表示,“對設備的完全控制非常必要,這樣才能有效進行車輛的牽引控制和轉向等操作。”
Götz博士表示,公司選擇首先將自動駕駛技術應用至農業領域,而后還會向工程機械等其他領域推廣。
“這款Innovation Tractor測試原型機融合了所有我們認為在農機和工程機械中比較實用的功能,”采埃孚公司研發主管Harald Naunheimer博士表示,“重點是展示現有技術水平已經可以實現的功能,并為未來的技術創新設定基準。”
自動化操作和鉤掛監測
采埃孚的Innovation Tractor共采用了10個攝像頭,全面監測周邊環境。憑借這些攝像頭提供的數據,拖拉機才得以實現半自動駕駛,或可直接通過車外移動設備進行操控,這可以使機具的鉤掛更加容易。
具體來說,6個攝像頭安裝在駕駛艙和發動機蓋上。車載計算機可以分析攝像頭傳送過來的圖像,并呈現一個360°的環視影像。駕駛員可以在平板上從各個角度查看這些圖像,其中包括俯瞰視角。
Götz表示,正如汽車行業一樣,這些攝像頭可以實現互聯,提供障礙監測預警功能,甚至在必要時還可以與制動系統進行連接。
另外2個攝像頭安裝在拖拉機后方,負責鉤掛機具的監測。最后,還有2個攝像頭也安裝在拖拉機的后方,負責支持行人監測功能。值得注意的是,位于拖拉機后方的4個攝像頭采用了獨立數據處理單元。
Götz表示,未來在理想狀態下,公司會將拖拉機上的攝像頭數量從現有的10個整合至4個,均安裝在車頂,通過協同作用,保證多種車輛功能的實現。
Innovation Tractor的SafeRange安全距離功能,允許駕駛員離開車輛,并在安全距離之外遠程控制拖拉機和拖車。此時,駕駛員可以在平板上觀察拖拉機與拖車的俯視圖像。車輛的各種操作命令也已整合到這個操控界面,對于一些復雜環境下的倒車操作,用戶可以直接指定希望拖車轉向的方向,接著車輛系統將進行各種計算,并自動執行各種必要的轉向動作。
駕駛員還可利用平板電腦調節車輛速度,拖拉機和拖車均可進行這樣的調節。車輛的最高前進速度為4 km/h (2.5 mph),而倒車速度為2 km/h (1.2 mph)。如果駕駛員停止在平板上的操作,或平板與牽引機之間的網絡連接斷開,車輛均會自動停止運轉。值得注意的是,SafeRange安全距離功能在沒有拖車的情況下也能操控拖拉機。
對于自動鉤掛功能,目前Innovation Tractor的拖車上還設置了3個目標位,以協助指導系統發揮作用。Götz博士表示,未來,公司將逐步移除這些輔助目標位,轉而采用一些其他的技術支持。
Götz解釋說,“你可以在不同的應用環境下將車輛算法調整至更佳,但這個過程將非常漫長。我認為,未來我們的系統將整合光學攝像頭和激光系統。激光系統的功能非常強大,可以為車輛提供更加準確的監測信息,而且不但可以關注距離,還能關注環境的變化。因此,我認為自動駕駛操作勢必會帶來傳感器的融合。”
Hitch Detection鉤掛監測系統可以使用攝像頭監測拖車的準確位置,以及拖車與拖拉機之間的相對角度,最大工作距離長達7米。在整個鉤掛過程中,Hitch Detection系統將不斷進行監測,并實時調整輪向車輪的角度。這款Innovation Tractor可以進行自動操作,直至達到最佳鉤掛位置,而后將控制權交給駕駛員。系統誤差為1.5厘米。
此外,當駕駛員通過平板電腦進行常規操作或機具鉤掛時,車輛的攝像頭將持續監測車輛周邊7米之內的行人,并將相關信息顯示在平板電腦上。當有行人位于危險位置時,如果操作牽引機的駕駛員未能及時作出反應,車輛將自動停止運行。此后,只有當行人遠離危險區域后,剛剛已經中斷的鉤掛過程才會重新啟動。
“農場經常會發生拖拉機碾人的事故,因此我們的系統帶來了一項巨大的進步。”Götz博士表示,“目前,尚無任何法規強制要求車輛采用行人監測系統。不過,一旦此類技術真正進入市場,一定會有法規強制要求車輛采用這種解決方案。”
動力傳動系統的電氣化
采埃孚Innovation Tractor的動力傳動系統電氣化可以體現在多個方面,比如公司的TERRAMATIC變速器,用于為拖車與機具供電的電動單輪驅動TERRA+發電機模塊,以及專門開發的牽引力管理系統。此外,這款拖拉機還將自動駕駛系統所必須的電動轉向系統整合至車輛的控制網絡。
動力傳動系統可以持續提供功率為50千瓦的電力,并為拖車中的用電設備提供電源。車輛的電動磨輪頭內整合了2個液冷三相異步馬達,可以節省拖車車軸所占的空間;而對于拖車而言,該系統則安裝在中軸上。系統額定電壓為400V,此外還搭配了一個輪閘。
電機可為每個車輪提供6000 N·m (4425 lb·ft)的最大扭矩。
Götz博士表示,“雖然目前已經具備了相應的能力,但我們還沒有進行制動系統的電氣化,這將是我們的下一步工作。”制動系統可以幫助設備在下坡或轉向時有效減速,從而防止車輛彎折與翻滾。Götz博士表示,“我們必須將制動系統整合在控制系統內,從而利用電動軸提供制動扭矩。這里的工作主要就是設置各種參數。”
Götz博士表示,車輛差速器中的扭矩矢量分配系統,可以為每個車輪分配不同的功率。目前,該系統并未安裝到Innovation Tractor上,但未來可能有所應用。
“我們可以提供70 kW,甚至100 kW的持續功率。”Götz博士表示,“現階段,我們為Innovation Tractor展示機安裝了一款50 kW的發電機系統。該系統已連接至車輛的動力電子元件,可以向拖車的各個車輪傳輸電流。但我們這樣做并不是為了給這些電子元件供電,真正的目的在于實現有效控制。這樣一來,我們才能真正優化拖拉機與拖車之間的牽引力控制。”
采埃孚拖拉機的全輪驅動AWD系統和拖車單輪驅動系統的電力推動功能可以協同工作,從而提供最佳的牽引力管理性能。Götz博士表示,在拖車電子輔助功能的幫助下,采埃孚的拖拉機可以爬上坡度高達30%的坡道,這是傳統拖拉機做不到的。此外,這款拖拉機還可以應對空曠場地下的困難工況。
車輛的牽引力管理主要由兩個因素決定:其中耦合力決定拖拉機是正在推還是拉,另一個決定因素是拖車的負載監測。
此外,對于一些只是偶爾進行滿載行駛的用戶,拖車提供的額外功率,可以讓這部分用戶有機會選擇較小的拖拉機。
采埃孚承認,目前CVT無級變速器的效率與全電動驅動系統相似,但成本更低,這的確阻礙了電氣化進程的發展。然而,從操控性及牽引力控制優化方面來看,電力驅動系統仍表現出一定優勢。此外,Götz博士預測,在未來可能5到20年內,非公路車輛領域也需要面對相應的二氧化碳排放規定,而這當然也會推動電力驅動的發展。
作者:Ryan Gehm
來源:SAE《非公路車輛》雜志
翻譯:SAE 中國辦公室
Automation, electrification focus of ZF’s Innovation Tractor prototype
The passenger-car industry may be driving development of advanced driver-assistance systems (ADAS) and electrification, but the off-highway segment may be best-positioned to utilize them more widely—and sooner.
“The main movement for [driver-assistance systems] is in passenger cars, although it’s much more difficult to get this on cars because of all the regulations,” said Dr. Manuel Götz, responsible for Advanced Engineering, Industrial Technology at ZF. “So I believe in the future, we’ll be seeing autonomous vehicles in off-highway more regularly and even earlier than on the highway. Due to the fact that we’re in an enclosed environment and don’t have the regulations of on-highway, this could make things easier to implement.”
“A higher degree of automation also addresses the trend of operators being less trained in the future and not being able to find highly trained people to operate more and more complex machinery. So this [Innovation Tractor] is a step toward autonomous operation,” he added.
ZF is making a concerted effort to transfer the intelligent systems it’s developed initially for passenger cars into heavy trucks and buses, as well as off-highway equipment. To effectively illustrate this point, engineers in the company’s Advanced Engineering department have spent the past year designing the Innovation Tractor, an advanced-technology demonstrator loaded with cameras and electronics to allow automated maneuvering and hitching, not to mention pedestrian detection. Electric single-wheel drive for trailers and implements helps to dramatically improve traction management, as demonstrated in Aachen, Germany, on a 30%-grade paved road that was thoroughly watered down.
“We have full control not only of the driveline and the engine on this vehicle but also the steering and the brakes,” he said. “This is necessary to have full control over the vehicle and to do things like trajectory control and steering the vehicle.”
Agricultural was selected as the first application for these automation technologies, but they are viable for construction and other off-highway segments, said Götz.
“The Innovation Tractor brings together in a test prototype all the new functions we believe are practical for agricultural and construction applications,” said Dr. Harald Naunheimer, Head of R&D at ZF Friedrichshafen AG. “The focus was on demonstrating what is already possible and technically feasible today, but sets a benchmark on future innovation.”
Automated operation and hitch detection
The Innovation Tractor is equipped with 10 environmental cameras to monitor its surroundings; the data from these cameras enables the vehicle to maneuver semi-autonomously or via mobile devices operated outside the driver's cab, making it easier to hitch implements, for example.
Six cameras are mounted on the driver’s cab and the hood. A computer analyzes the images and generates a 360° surround-view image of the tractor's environment. The operator can view this image on a tablet from various perspectives, including a bird’s-eye view.
These cameras could be linked to provide warnings for obstacle detection and to brake, if necessary, as is becoming more common in passenger cars, Götz said.
Two cameras located at the rear of the tractor are used for the Hitch Detection function. Two additional rear cameras, monitoring a 180° swath, have pedestrian-detection capabilities. These four rear-mounted cameras have a separate data-processing unit.
In future iterations, the tractor ideally will utilize just four cameras, all mounted on the roof, to handle all of these functions, said Götz.
The Innovation Tractor's SafeRange function allows the driver to leave the vehicle and remotely control the tractor/trailer combination from a safe distance. The Innovation Tractor and trailer are outlined as a bird's-eye view on a tablet display from which all the relevant driving and steering commands are managed. Dragging the tractor or trailer image with a finger to the right or left on the screen causes the actual tractor/trailer combination to maneuver in the chosen direction. For reversing in complicated situations, the user can specify the desired direction for the trailer and the system calculates and executes all the necessary steering movements.
Speed is set by swiping the screen from the center to the edge, across the tractor model or the trailer. The maximum forward speed is 4 km/h (2.5 mph), with the top reversing speed limited to 2 km/h (1.2 mph). When contact with the screen is removed, or if radio contact is lost between the tablet and the tractor, the vehicle stops automatically. SafeRange also works when maneuvering the tractor without a trailer.
For the automatic hitching, currently there are three target shields mounted on the trailer to help guide the system. These shields will eventually go away, said Götz, but additional technology is required for that to happen.
“You have the opportunity to train your algorithm better on different implements, but this is a very lengthy [process]. I believe that in the future we might have a system that combines an optical camera and a laser system. With laser you have additional possibilities of detecting much more accurately, not only distances but also how the environment is changing. So I think we’ll see this sensor fusion for autonomous operation,” Götz explained.
The Hitch Detection system uses cameras to detect the exact position and angle of the trailer in relation to the tractor by using the targets. It works up to a distance of 7 m (23 ft). The position is continuously measured during the hitching process and the angle of the steered wheels corrected. The Innovation Tractor maneuvers automatically until it reaches the optimum position for hitching, which then is completed by hand. The system has a tolerance of 1.5 cm (0.6 in).
While using the tablet for maneuvering and hitching, cameras can detect pedestrians located between the vehicle and trailer up to 7 m away, with this information also displayed on the tablet. If the person controlling the tractor fails to respond, the system stops the vehicle. The interrupted hitching process can be restarted only once the pedestrian has moved out of the way.
“Many accidents happen on the farm with people getting run over, so this is a huge step,” said Götz. “Right now we don’t have the regulations demanding such a solution, but once the industry shows such technology I believe there will be regulations to have it implemented on the vehicles.”
Driveline electrification
Drivetrain electrification for the Innovation Tractor comes via ZF's TERRAMATIC transmission with the TERRA+ generator module, an electric single-wheel drive for trailers and implements, coupled with specially developed traction management. An electric steering system, required for automatic-driving functions, has been built into the control network.
This system generation can provide 50 kW of continuous electrical power and serves as the power source for the electrical consumers in the trailer. Two liquid-cooled, 3-phase asynchronous motors are integrated into the electrical wheel heads, saving space on the trailer axle; for the Innovation Tractor’s trailer, the system was installed on the middle axle. The nominal voltage is 400 V, and the system also can be fitted with a wheel brake.
The motors provide 6000 N·m (4425 lb·ft) maximum torque to each wheel.
“We have not yet implemented [the braking] but it is possible; it will be our next step,” said Götz. This function can help with deceleration when going downhill and making a turn, helping to prevent jackknifing and rollover. “We have to implement it in the control so we can use the electric axle to provide a braking torque. It is just a matter of applying the parameters.”
Torque vectoring—which is employed in automotive differentials and provides the ability to vary the power to each wheel—is another technology currently not available on the tractor but would be possible to implement, he said.
“From a space perspective we can go up to 70, even 100 kW continuous power,” said Götz. “In the vehicle at the moment we have installed a 50-kW generator system which is linked to our power electronics, from which we transfer the electric current to the wheels of the trailer. We’re not only powering them, we’re also controlling them; this way we are able to realize optimized traction control between the tractor and the trailer.”
The all-wheel-drive function of the ZF tractor and the electrical-boost function from the single-wheel drive on the trailer combine to deliver optimum traction management. With electrical assistance from the trailer, the tractor can climb uphill gradients of up to 30%, terrain normally off-limits for a conventional tractor/trailer setup, Götz noted. It also helps in difficult conditions in the open field.
A combination of two inputs determine traction management: the coupling force to determine if the trailer is pushing or pulling, and detection of load in the trailer.
The additional power from the trailer also allows a higher payload to be transported with a downsized tractor, ideal for users who only occasionally tow a fully-laden trailer.
ZF admits that its current CVTs are about as efficient as the full electric drive and less costly, so that hinders the move toward electrification. Other factors, however, such as improved controllability and the possibility for optimized traction control can help spur electric-drive adoption. As, of course, could CO2-emissions regulations, which “might not be that far off” for the off-highway sector, somewhere between five and 20 years down the road, Götz predicted.
Author: Ryan Rehm
Source: SAE Off-Highway Engineering Magazine
 掛鉤偵測系統允許ZF創新拖拉機(Innovation Tractor)自動接近,并將話誤差控制在1.5cm之內。
掛鉤偵測系統允許ZF創新拖拉機(Innovation Tractor)自動接近,并將話誤差控制在1.5cm之內。 正是拖車上安裝了電驅動車輪,因此其自身也提供了額外的驅動力矩,結合運用ZF 創新拖拉機 Innovation Tractor的牽引管理系統使得拖拉機能夠爬上30度的陡坡。
正是拖車上安裝了電驅動車輪,因此其自身也提供了額外的驅動力矩,結合運用ZF 創新拖拉機 Innovation Tractor的牽引管理系統使得拖拉機能夠爬上30度的陡坡。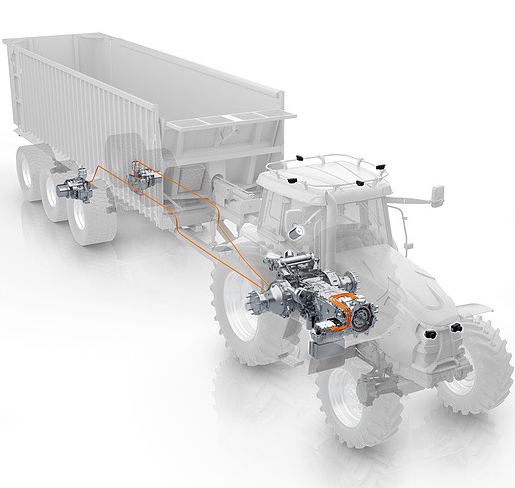 通過ZF創新拖拉機(Innovation Tractor)原型機,我們可以看到自動駕駛功能和電氣化傳動系統是如何使拖拉機的操作更加方便、高效、安全的。
通過ZF創新拖拉機(Innovation Tractor)原型機,我們可以看到自動駕駛功能和電氣化傳動系統是如何使拖拉機的操作更加方便、高效、安全的。 行人監測系統的運用使得Innovation Tractor能夠及時偵測到行人并采取制動措施。
行人監測系統的運用使得Innovation Tractor能夠及時偵測到行人并采取制動措施。