當今效率最高的發動機無一例外都是復雜的機器,無論是汽油發動機還是柴油發動機。它們的閥門正時、升力、直接燃油噴射、渦輪增壓等性能都可以改變,而且廢氣循環系統(EGR)也多種多樣。發動機結構必須足夠復雜,才能平衡燃油經濟性和排放控制。
為了控制一堆復雜的作動器,需要使用精確且反應靈敏的傳感器。從進入歧管的整道氣流到氮氧化物在排氣中的含量,傳感器必須測量各種數值。憑借著這些數據,發動機控制單元(ECU)就可以通過提前或延遲點火、控制閥門、調節渦輪增壓器的氣流等一系列操作,讓發動機在保持最佳性能的同時將排氣控制在限制范圍內。
最大的挑戰在于其復雜性與成本。工程師不僅要在一個制動器上操作十幾個或更多的獨立參數,而且增加設備本身也非常昂貴。測量氮氧化物或渦輪增壓器速度的傳感器可能需要花費一百美元以上(每臺發動機),霍尼韋爾汽車軟件總經理Chris Greentree表示。
但是,虛擬傳感器為我們提供了另一種解決方案。用軟件模型替代昂貴的硬件傳感器,可讓每臺發動機的傳感器成本變得微乎其微。
虛擬傳感器與物理學
Greentree解釋道:打個比方,為了創建一個虛擬的氮氧化物傳感器,工程師們首先需要根據生產傳感器和非生產傳感器上采集到的數據對一個模型進行校驗。這些數據包括氣缸內壓力和溫度、空燃比、流經氣缸的總氣流量、濕度和背壓等。接著將該模型進行簡化,只使用生產傳感器。“這些因素都會影響到排出發動機的氮氧化物的含量,所以如果我們的模型很正確,我們就能精確預測排出的氮氧化物含量,不再需要傳感器。”
虛擬傳感器這個理念的實施,似乎并不容易。有一種方法是使用實驗室或測功器上測得的數據創建一個統計學的反應表面,這些數據是用實驗設計(DOE)方法采集的。這些統計模型可以在不理解物理機制的情況下預測傳感器的反應。但它們只能提供大概的預測,預測結果的準確性取決于采集數據的多少。
因此,霍尼韋爾用OnRAMP研發工具提出了一種替代方案。使用這個工具,工程師就能在ECU中嵌入一個第一性原理模型,隨后再用它來創建虛擬傳感器。
“這是一個基于物理學的發動機系統模型,” Greentree解釋說,它的功能與工程師過去用于設計發動機的0D或1D系統模型很接近。“OnRAMP比傳統的系統模型更簡單,而運行速度卻高出一大截。我們稱它為‘中度保真的操控導向模型,’它可以讓你在ECU中以接近原始狀態的方式運行你的模型。”
他接著解釋道,盡管該模型的計算足跡較小,但它依然需要運用理想氣體定律、伯努利方程、質量與能量守恒定律等基礎物理學知識。用戶仍需使用DoE來收集數據,并校準模型,但OnRAMP及其所基于的物理控制策略,能夠提供其他優勢,那就是更好的控制模型和特定的虛擬傳感器。在將模型載入ECU之前,OnRAMP的開發環境可將模型優化得更小、更快,但更精確。
虛擬優勢
Greentree指出,霍尼韋爾的OnRAMP可使用虛擬傳感器測定下列5種物質——排出發動機的氮氧化物、選擇性催化還原過程中的氨、EGR流速、渦輪增壓器速度,以及空氣流速。除了極低的單位發動機成本外,虛擬傳感器的另一項優勢是比真是傳感器運行更快,可用性更佳。
“(比方說),一個實體的氮氧化物傳感器需要在發動機啟動一段時間后,才能達到運作所需的溫度。即便達到溫度了,它的工作原理也注定了信號的傳輸會略微延遲,因此很難用在反饋控制中,”他解釋道。
但OnRAMP則相反,該模型可以在氮氧化物離開發動機的那一刻預測其組成成分。“這種沒有延遲的信息可以單獨使用,也可以搭配實體傳感器來提高控制效果,” Greentree表示。
“不僅如此,如果你的傳感器用的越少,發生故障的可能性也越低,這也會省去一筆維修成本。”
Controlling engines with virtual sensors
The most efficient engines today, gasoline or diesel, are complex machines, with variable valve timing and lift, direct injection, turbocharging, and various flavors of exhaust gas recirculation (EGR). Engines need to be complex to balance the competing demands of fuel economy with emissions control.
Controlling the complex array of actuators requires precise, fast sensors that measure everything from mass airflow into the manifold to the engine-out level of NOx. With these data, the engine control unit (ECU) can advance or retard spark, actuate valves, and adjust turbocharger flow to get the engine humming at its optimum performance while keeping emissions within limits.
The challenges are complexity and cost. Not only do engineers have to manipulate a dozen or more independent parameters for individual actuators, but also adding more equipment is expensive. The cost of an individual sensor that measures NOx or turbocharger speed can run into a hundred dollars or more (per engine), according to Chris Greentree, General Manager Automotive Software for Honeywell.
Virtual sensors provide an alternative. They replace costly hardware sensors with software models that can cost very little per engine.
Virtual sensors and physics
As Greentree explains, for example, to create a virtual NOx sensor, they first calibrate a model using data from production and non-production sensors. These include in-cylinder pressure and temperature, air/fuel ratio, mass airflow through the cylinder, humidity, and backpressure sensors. Honeywell then simplifies the model to use only production sensors.
“All of these influence how much NOx will be produced, so if we model it correctly, we can accurately predict engine-out NOx and eliminate that sensor,” said Greentree.
The idea of virtual sensors is one that seems to be gaining traction. One way they are implemented is to use statistical response surfaces created from data measured in a lab or dyno, usually collected using Design of Experiments methods. These statistical models predict sensor responses without really knowing the physics. They are approximations only. Their utility is limited to how much data is collected.
Honeywell offers an alternative approach in its OnRAMP development tool. The tool allows engineers to embed a first-principles model in the ECU, using that to create virtual sensors.
“It is a physics-based model of the engine system,” explained Greentree, similar in function to familiar 0D or 1D system models engineers use to design engines. “The OnRAMP model is simpler than traditional system models and runs significantly faster than real time,” he explained. “We call it a ‘medium fidelity control oriented model,' allowing you to run your model native in the ECU.”
He went onto explain that, while it boasts a small computational footprint, it still incorporates basic physics such as the Ideal Gas Law, Bernoulli’s Equation, and Conservation of Mass & Energy. As he describes it, users still collect data using a DoE to calibrate the model, but the advantages of OnRAMP and its physics based control strategy is both a better control model and specific virtual sensors. Before loading it into the ECU, the OnRAMP development environment optimizes the model to create a smaller, faster running but still accurate model.
Virtual advantages
Honeywell’s OnRAMP enables five specific virtual sensors: engine-out NOx; selective catalytic reduction mid-bed ammonia; EGR flow rate; turbocharger speed; and fresh airflow rate. Another advantage besides very low per engine cost is that these virtual sensors respond faster and offer greater availability than real ones, according to Greentree.
“[For example], a physical NOx sensor takes some time after engine startup to reach a temperature sufficient for the sensor to function. Even after it has reached temperature, the operating principle of the sensor means that the signal will be slightly delayed, making it challenging to use in feedback control applications,” he explained.
In contrast, the OnRAMP model predicts the formation of NOx while it is leaving the engine. "This non-delayed information can be used on its own, or in conjunction with a physical sensor, to improve control," said Greentree.
“There are also less things to fail if you have fewer sensors, reducing possible warranty costs,” he said.
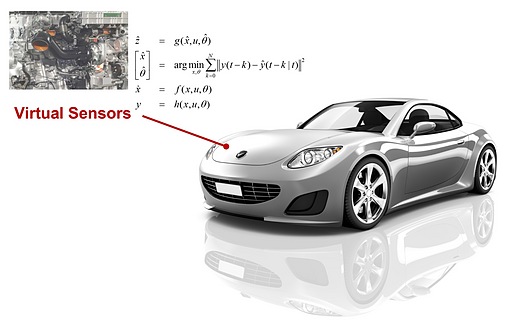 虛擬傳感器是一種位于發動機ECU內部的計算機模型,它利用來自其他傳感器和來源的數據,重建可代替真實傳感器的數據。(霍尼韋爾)
虛擬傳感器是一種位于發動機ECU內部的計算機模型,它利用來自其他傳感器和來源的數據,重建可代替真實傳感器的數據。(霍尼韋爾) 霍尼韋爾的汽車軟件總經理Chris Greentree正在介紹,嵌在發動機ECU中的第一性原則模型如何實現虛擬傳感器的快捷與精確。
霍尼韋爾的汽車軟件總經理Chris Greentree正在介紹,嵌在發動機ECU中的第一性原則模型如何實現虛擬傳感器的快捷與精確。